school 群れの理解と制御
制御工学の発展により自動車・ハードディスク・ドローンなどの人工物の動きを高い精度かつ信頼度をもって操ることができるようになりました.例えばハードディスクの場合は読み出し装置がナノメートルオーダーの精度で制御されています.今や自動車に不可欠なアンチロック・ブレーキシステムの設計ではフィードバック制御の考え方が欠かすことの出来ない役割を果たしています.このような個々の人工物の制御に関する大きな進歩が理論・応用の双方で20世紀に起こりました.
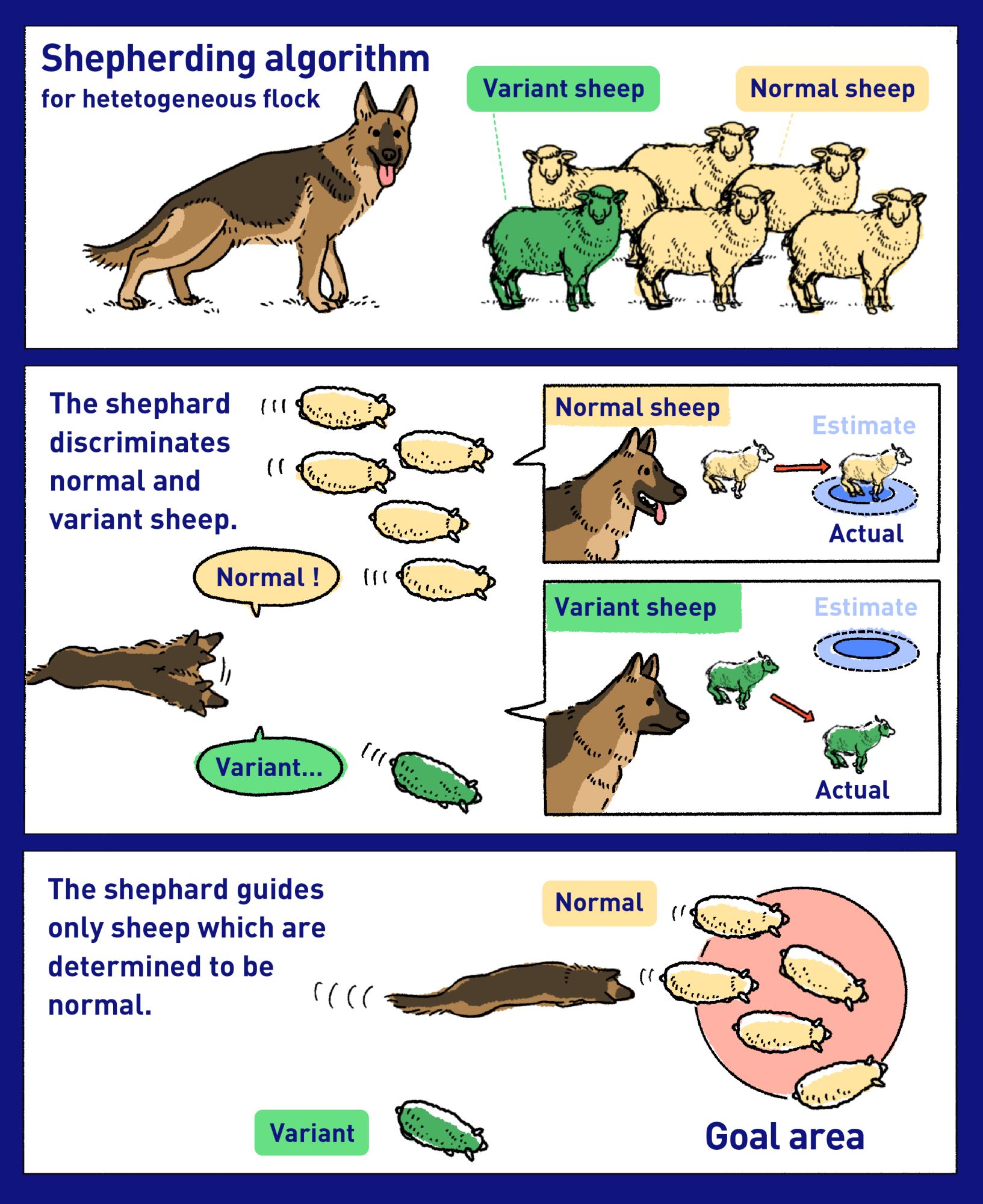
一方で大量の非人工物,特に生物群の動きを思い通りに操ることは依然として難しい問題として残されています.個体の特性のばらつき,信頼できる動的モデルの欠如,無視できない非線形の存在など,従来の制御工学だけではアプローチが困難な課題が多く存在しています.そこで若宮研では,制御工学の長所を活かしつつ生物からも学ぶことで,生物群の誘導のための革新的な情報通信技術の開発に取り組んでいます.
研究対象とする生物群は家畜群,魚群,鳥群,群衆など多岐にわたります.それぞれの群れの特性,属する環境の特徴,とりうる制御方策の範囲,そして誘導の目的に応じて適切な情報通信技術を開発します.理論とシミュレーションの両方を柔軟に用いると同時に,開発した技術を実際の生物群へ適用することで,技術の連続的な改善を行います.
詳しくは小蔵准教授のウェブページをご覧ください.以下は研究の一端を示す動画像です.